Research Scheme of Photoelectric Tracking Servo System Based on MSP430 Microcontroller
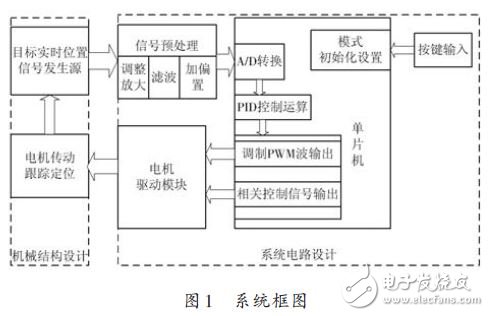
In the research design, the principle of using light sensitive devices for optical signals in a specific optical wavelength range is combined. The four-quadrant photoelectric position detector is combined with the MSP430 series single-chip microcomputer. According to the linear relationship between the output voltage of the four-quadrant photodetector and the position of the spot, the digital PID is adopted. The closed-loop control output voltage regulates the duty cycle of the microcontroller's output PWM to achieve accurate and stable search and small-range tracking targets. 0 Preface The photoelectric tracking system is based on optoelectronic devices (mainly lasers and photodetectors), which combines optical technology, electronic/microelectronic technology and precision mechanical technology to form a device with specific tracking functions. At present, the more advanced photoelectric tracking systems at home and abroad are mainly composed of a laser range finder, a TV tracker and an infrared tracker. The use of mechanical methods to achieve tracking system control is not very sensitive. For a photoelectric tracking system, specific tracking tasks are generally completed by target recognition, position signal detection, position signal processing, PID servo control calculation, drive control, position feedback, and target non-stop tracking. The matching target recognition detection processing and PID servo control implementation are very important parts, which is the key to ensure the whole system can work normally. In order to better realize the accurate tracking servo system, the MSP430 single-chip microcomputer is used in this scheme to complete the PID closed-loop control of the target positioning tracking, and the S066A's domestic four-quadrant detection is used to identify and track the target. The MSP430 microcontroller is a 16-bit high-performance mixed-signal processor introduced by TI (Texas Instruments) in the United States in recent years. Because of its processing power, fast computing speed, high integration, rich external devices, and ultra-low power consumption, it has been widely used in many fields. S066A domestic four-quadrant detector has a spectral response range of 400~1 100 nm, and its peak wavelength is 940 nm. It has high sensitivity and accuracy and is widely used in position detection, optical positioning and distance detection. The significance of this research program lies in the use and promotion of four-quadrant detectors and new low-power and highly integrated microprocessors on the one hand; on the other hand, it explores a new mechanical alignment structure design and development of low-cost tracking systems. Provide a feasible solution. 1 overall design The design of the whole system is shown in Figure 1. It consists mainly of mechanical transmission design and system circuit design. The target real-time position signal generation source in the mechanical part uses a four-quadrant detector to locate the target and outputs four electrical signals containing the target position information. The motor drive tracking positioning is based on the four-way position signal to drive the positioning panel where the detector is located. Search and lock on the target. The mechanical part integrates the detection and positioning, the target can be seen, and the transmission of the motor and the positioning panel is fast and convenient to drive with angular displacement as a variable. The MSP430F169 integrates multiple function modules on-chip in the system circuit design section. This design uses it as the processing core, and its on-chip A/D module realizes the conversion of analog signals and digital signals. On the one hand, TImer divides the clock to increase the clock frequency, so that A/D can get faster sampling rate or conversion speed to ensure the accuracy of A/D conversion; on the other hand, TImer's output unit can be used as PWM signal generator. According to the on-chip programming, the result of PID high-speed operation processing produces PWM output control signal. The setting is simple and convenient, which simplifies the circuit design and reduces the complexity of system design. The position signal of the receiving front end uses a low offset, high precision amplifier to adjust the signal, and the filter is used to optimize the position signal to meet better accuracy and positioning requirements. The existing motor drive chip is used at the output of the control signal to ensure stable operation of the motor. Based on the overall design scheme, this paper divides it into four different but interacting aspects to achieve the research. Specifically, it includes hardware circuit design, mechanical simulation model design, PID algorithm design, and software programming.
China Square Pos System,Retail Pos System,Pos System For Small Business Manufacturer and Supplier
The kinds of sales you make and the sorts of tasks you need help with depend on your business type. A busy cafe might have different needs than a clothing boutique, and a small business Dual Screen Pos System that works for a plumber understandably might not make sense for a fitness studio.
For any small business Dual Screen Pos System, cost (initial as well as ongoing), security, PCI compliance, and usability should be the top factors in choosing the best Dual Screen Pos System. This article helps you understand what to look for in a Dual Screen Pos System so you can make the right decision for your business.
Dual Screen Pos System Square Pos System,Retail Pos System,Pos System For Small Business,Retail Pos Software Shenzhen Gmaii Technology Limited , https://www.gmaiipos.com