Design high-performance and low-power motor control systems
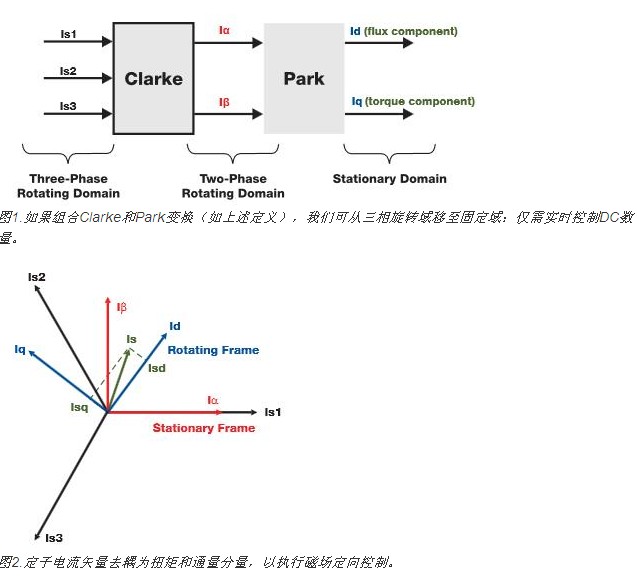
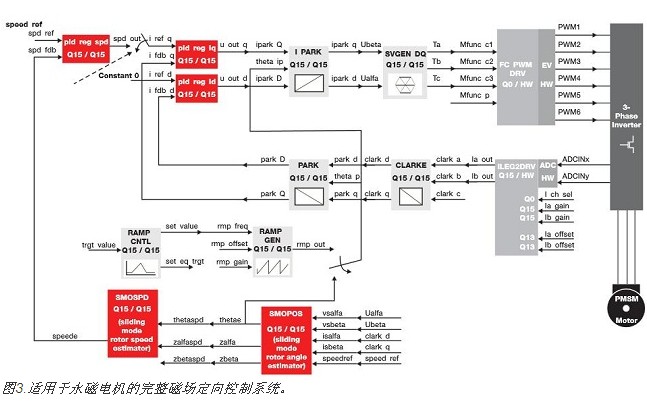
This article provides an overview of motor control design issues such as multiple motor control, field-oriented control, power factor correction, and sensor control. It also describes how today's microcontrollers (MCUs) enable a wide range of applications with greater accuracy, lower power consumption and lower cost. Today's microcontrollers (MCUs) enable a wide range of applications with greater accuracy, lower power consumption, and lower cost, including: â— White goods and equipment with fans and compressors, such as washing machines and refrigerators â— HVAC (Heating, Ventilation and Air Conditioning) system â— Industrial servo drive for motor control, power inverter and robot â— Automobile control system, including power steering, anti-lock brakes and suspension control TI understands the challenges developers face when designing these high-performance motor control systems. Manufacturers seek to introduce advanced control algorithms to achieve product differentiation, while increasing government regulations require more efficient power consumption and reduced EMI. To help developers meet these diverse challenges, TI provides the TMS320C2000 Piccolo MCU series. Piccolo MCU has an optimized architecture, integrated with dedicated peripherals, capable of: â— Use real-time algorithms to obtain more precise control â— Higher power efficiency and better control through power factor correction (PFC) â— Support controlling multiple motors through a single chip â— Simplify design through sensorless control â— Reduce system complexity and cost Piccolo Advantages Piccolo MCU utilizes TI's high-performance TMS320C28x core to provide all the performance and peripherals required to control the system with a single independent controller. With sufficient margin and dedicated peripherals, Piccolo MCU enables developers to implement more advanced control algorithms to further improve performance while reducing system costs. The Piccolo architecture has been optimized for digital control applications, has advanced architectural features, and enhances high-speed signal processing capabilities. Piccolo's main CPU core has single-cycle 32 & TImes; 32-bit multiplication and accumulation unit and other built-in DSP functions, which greatly improves the calculation speed. In addition, control peripherals such as ADC and PWM are designed to be very flexible and can be easily adapted to almost any use, while requiring minimal software overhead. For example, the automatic sequencer included in the analog-to-digital converter allows developers to program to cycle through a specific sequence of samples so that the value is ready when the application requires it. Using smarter control peripherals and a powerful CPU core, the control loop runs more tightly, which not only improves the dynamic characteristics of the control algorithm, but also reduces interference behavior. The control law accelerator (CLA) integrated on the TMS320F2803x and F2806x Piccolo MCU is a 32-bit floating-point math accelerator, which can effectively carry the high-speed control loop of the main CPU core. CLA achieves this process by directly accessing peripherals and responding to peripheral interrupts without going through the CPU core. Similar to the independent core, CLA has its own instruction set and memory space, and can operate completely independent of the CPU. Other important Piccolo MCU features include: â— 3.3-V single power supply supports the operation of all functions â— Double internal high-precision oscillator; no external crystal required â— 12-bit A / D converter has 16 channels, the maximum sampling frequency is 4.6 trillion samples per second â— Up to 19 channels of PWM output with configurable automatic dead zone â— Up to 8 of 19 PWM channels can work in high-resolution mode, which can be as low as 150 picoseconds â— Enhanced Quadrature Encoder Pulse (QEP) and Enhanced Capture Peripheral (eCAP) can simplify sensor decoding Precise and accurate control The Piccolo architecture provides excellent processing capabilities, reaching 40 to 80 million instructions per second (MIPS). This high performance allows developers to not only monitor and control multiple motors simultaneously, but also execute more complex control algorithms to achieve higher accuracy, smoother performance, and lower power consumption. For example, a single Piccolo MCU can control two motors while maintaining active PFC control, and still has enough processing power to perform advanced motor control algorithms, such as sensorless field-oriented control (FOC). Pulse width modulation (PWM) plays an important role in generating the voltage or current supplied to the motor or high-performance power supply. The latest improvements in control algorithms enable developers to implement highly accurate algorithms to provide dynamic control that adapts to real-time changes in system behavior. FOC has many advantages, including low-speed full motor torque function, excellent dynamic behavior, high efficiency across a large speed range, decoupling control of torque and flux, short-term overload function, and four-quadrant operation. However, FOC also requires significantly more complex calculations than standard control schemes. The FOC principle is to control the angle and amplitude components of the stator magnetic field by sampling the phase current of the motor, and then convert it to make it easy to control. The three-phase current of the motor is read into the system through the ADC. These phase currents are in the three-phase rotation domain and are transformed into a two-dimensional rotation domain using Clarke transform. Thus, Park transformation can be used to convert these two phases into a fixed domain, as shown in Figure 1. Clarke and Park transformations can be visualized as vector projections of each other, as shown in Figure 2. The Park transformation produces a flux component Id and a torque component Iq. The motor torque of a permanent magnet motor depends only on the torque component Iq. Therefore, the most convenient control strategy is to set the flux component (Id) to zero, which will minimize the torque-current ratio and improve the motor efficiency. The control of the current component requires knowledge about the instantaneous rotor position. The rotor position can be calculated using sensorless technology or measured using sensors. Since the output of the Park transform is in a fixed domain, it can be controlled using traditional techniques such as PID loops. Then the output of the PID loop can be input into the reverse Park and reverse Clarke, and then directly input to the motor driver. Figure 3 shows a complete FOC motor control system that uses sensorless technology to obtain rotor position. The ADCINx and ADCINy outputs of the three-phase inverter are two of the three phase currents; the third is easy to calculate. As mentioned above, the phase current is input from here into the Parke and Clarke transformation. This sensorless system uses "SMOPOS" and "SMOSPD" to calculate the rotor position based on the feedback of the three-phase current, eliminating the need to use expensive sensors. FOC is an important technology designed for systems using permanent magnet (PM) motors. The popularity of PM motors in white goods is increasing. They have higher power density and are not easy to wear, so their efficiency is very high. Developers only need to provide a few vectors and directions of rotation to achieve real-time signal output updates. Advanced control mechanisms such as FOC are important technologies to improve performance without increasing costs. The Piccolo architecture greatly simplifies the generation of symmetrical PWM waveforms. With Piccolo MCU, developers can easily introduce changes to precise control while still leaving enough margin for PFC. In fact, TI is the first company to support both PFC and FOC functions on a single chip at a price point of $ 2-6. In 2008,a new industrial park of Liandajin was built in Daya Bay National Economic Development Zone,huizhou with CNY120 million.The Park covers an area of 20000 square meters including 12000 square meters of manufacturing plant,The employees has been up to 1000 and the output has been 60000 square meters per month. PCB,PCB Manufacturer,PCB Fabricator,Circuit Board,Printed Circuit Board Huizhou Liandajin Electronic Co., Ltd , https://www.ldjcircuitboard.com